Ivan Zinin
Mechanical, Electrical Design and Assembly
Andy Tu
Primary Software Programmer;
Circuits Designer
Circuits Designer
Angela Cheng
Mechanical Design and Assembly;
Solidworks Pro
Solidworks Pro
Cornell Lee
Electrical Design and Software
The Challenge
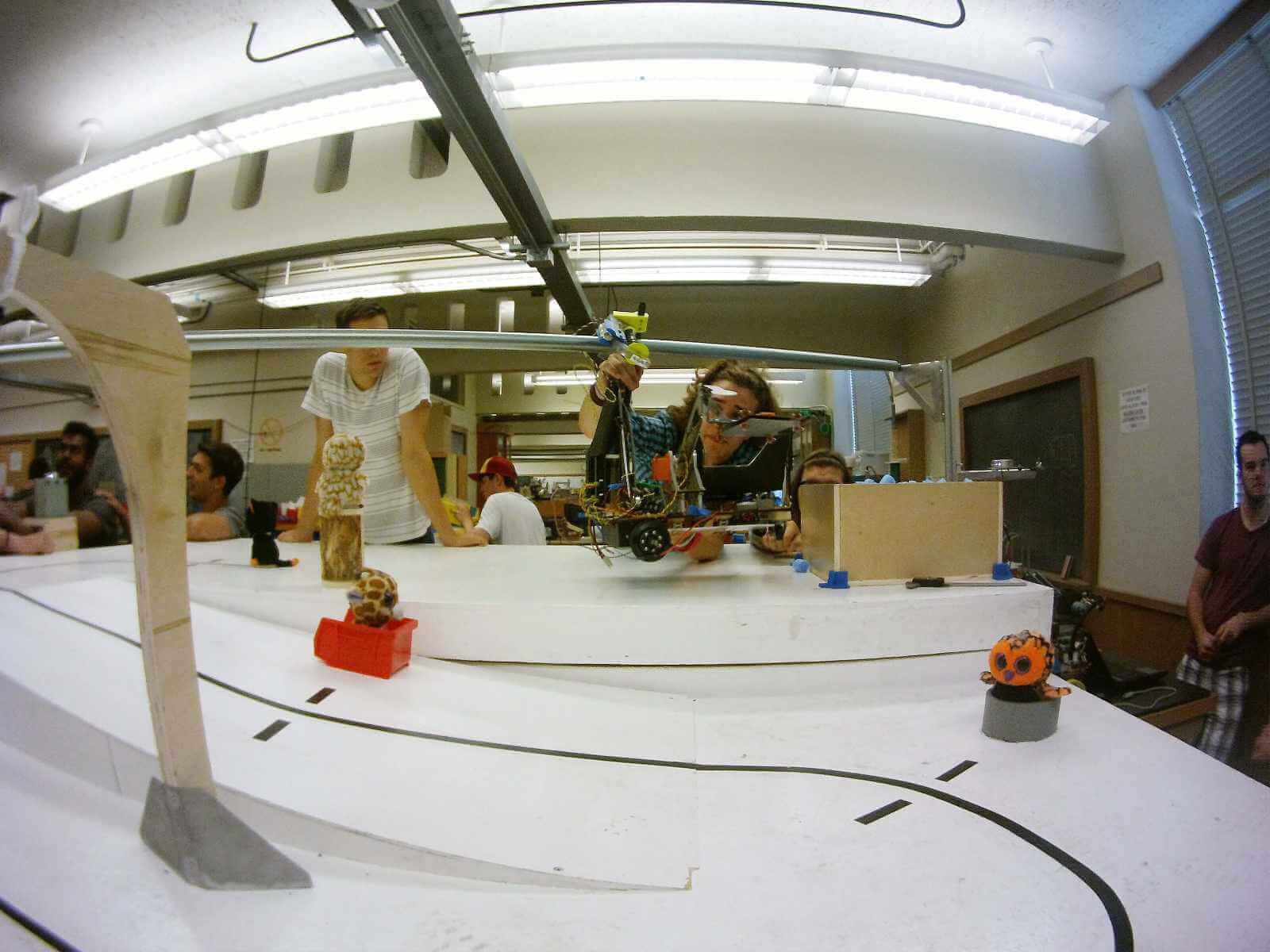
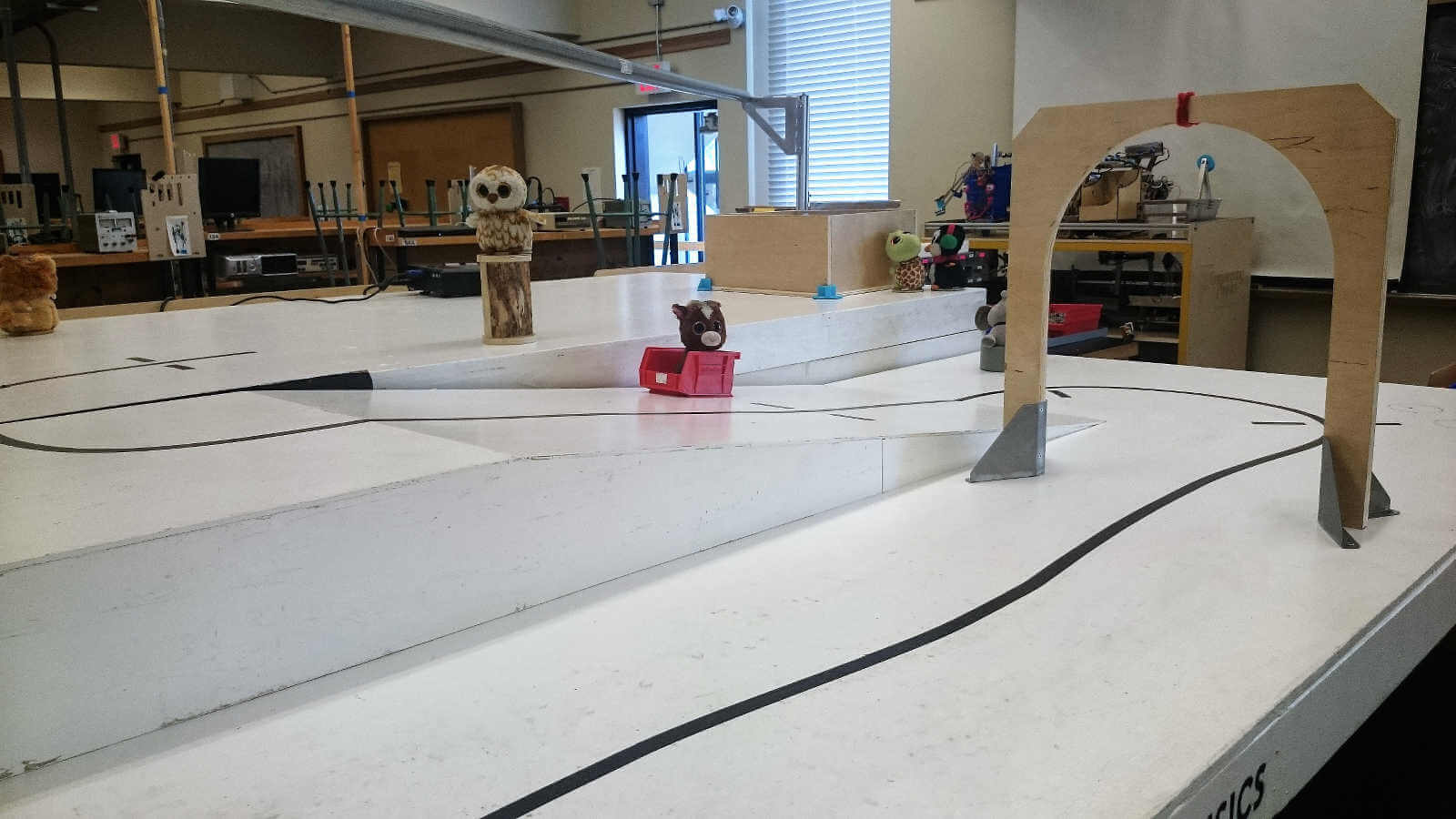
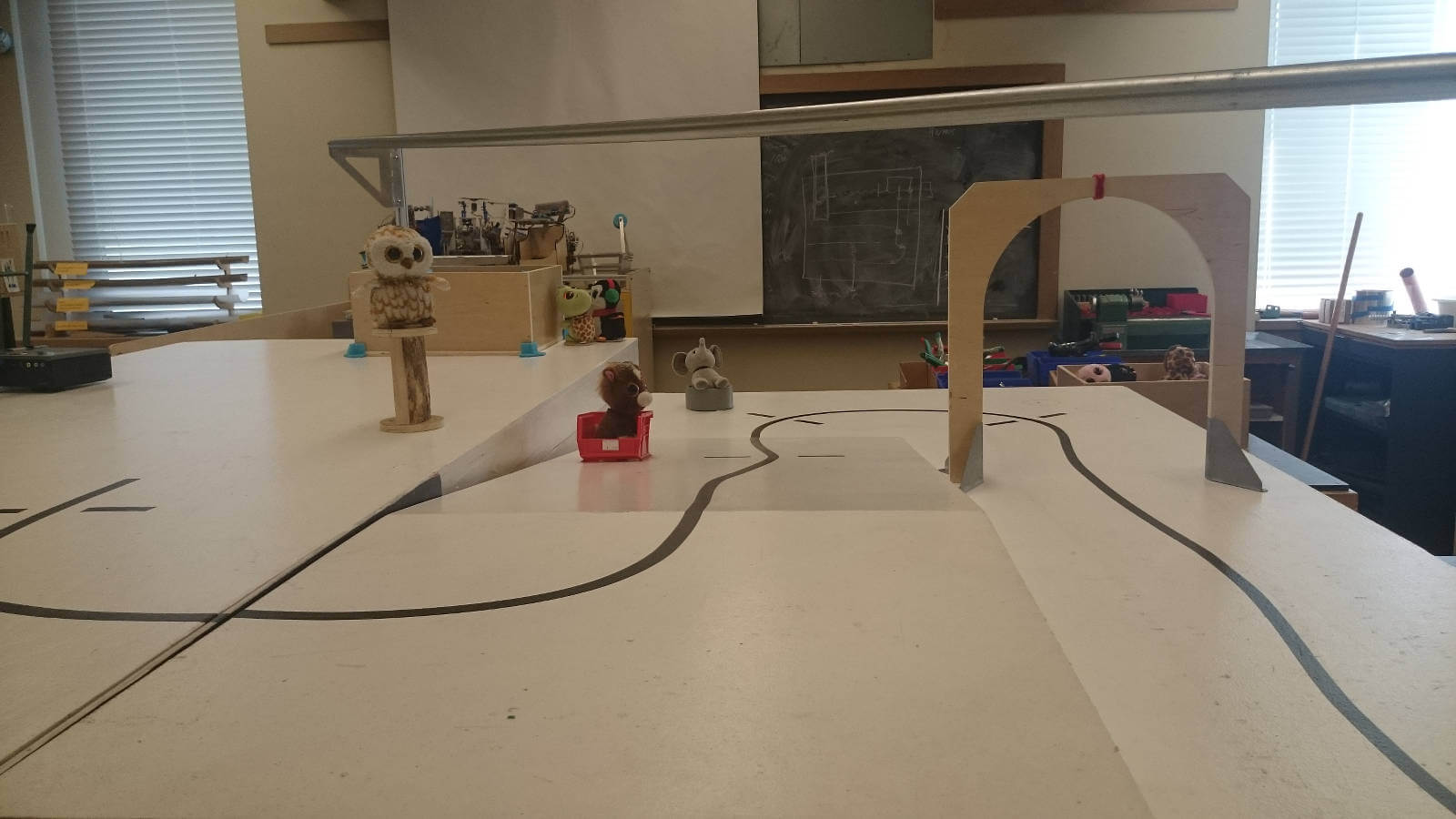
Emergency! There has been a fire at the local SPCA and six terrified animals have been trapped inside the burning building! The animals must now entrust their safe extraction to autonomous robots designed and prototyped by 2nd year UBC Engineering Physics students. This robot must navigate through the “burning building," an obstacle course, guided by reflective tape and IR beacons, and save the six stuffed animals hiding at various locations through whatever means possible. Integrating together creative electrical and mechanical systems, robots are programmed to attempt to bring all six animals back to safety within a two minute time frame. They must be quick, since a wall of fire will cut off the robot's means to escape from the burning building after 60 seconds!
The Solution
Integrating creativity with functionality, Steve is built to combat the complexity of the challenge in an interesting way. Many robots choose to use speed to get past the wall of fire, while others use the zipline. Steve is unique in that he is the only robot in the competition that relies solely on a catapult mechanism and clever arm placements to save the pets. This strategy thus avoids potential tape following errors on the way back to the safety area while also rendering the "wall of fire," which blocks a robot's return trip after one minute, irrelevant. To conserve battery power and save pets faster, the versatile arm allows for the placement of the second and third pet into the safety area directly from the ramp. The catapult mechanism is an arm-like structure with a holder at one end large enough to hold one pet. It is powered by a single ungeared motor powered directly from a 16V battery, providing the burst of energy needed to send the pet flying into the air and to safety.
Steve's arm has 3 degrees of freedom, allowing for precise positioning required for placing pets into the catapult.
Steve is flexible in where and how he can rescue the pets with some fine-tuning of his versatile arm.
Lining up with the safety area and firing the pet to freedom and a better life.
The Design
Catapult
The catapult is powered by a powerful motor supplied with 16V from the battery. The hand has a design cut out to minimize the weight, and folds along the supporting arm to increase the strength of the aluminum. Lock washers are used to prevent the catapult from disassembling itself with use over time.
Magnet Holder Linear Actuator
In order to use a powerful magnet to attract pets, we needed something capable of lifting that magnet away to drop the pet. In the end, we went with a travelling-nut linear actuator that pulls the magnet away from the hand to place pets securely while preventing accidental drops while repositioning the arm.
3D Printed Tire Mould
Our tire treads are moulded from a custom 3D printed mould. While it doesn't provide additional traction on a smooth, flat surface, it certainly looks cool.
Arm Gear System
The arm, while sturdy, is quite heavy with a pet attached. This required a large gear reduction (two 1:3 reductions) on the motor powering the lower arm, and a 1:4 gear reduction on the motor powering the upper arm in order to provide enough torque.
3 Points of Contact & Velcro Attachments
Since 3 points form a plane, we opted for 3 points of contact on the robot to ensure that the two powered wheels are always on the ground. To facilitate ease of circuit swapping and simple attachment, we velcro'd everything from the TINAH board, the batteries, to circuits and sensors.